





Strategy

- Determine game tasks, such as taxing in auto and scoring lower hub.
- Determine the robot skills required to perform the skills. (Both required skills and beneficial skills.)
- Analyze data from previous games to determine the number of points needed to get the desired result.
- Analyze the number of cycles needed to reach the number of points.
- Combine the information to form a list of required robot skills for winning a regional according to historical data.
- Determine the strategy.
4 Cargo auto cycle

| Action | Time |
| TAXI OUT OF TARMAX | 0.26s |
| COLLECT CARGO | 1.00s |
| MOVE TO SCORING POSITION | 0.85s |
| SCORE 2 CARGO IN UPPER HUB | 2.00s |
| DRIVE TO CARGO | 0.85s |
| COLLECT CARGO | 1.00s |
| DRIVE TO CARGO | 1.37s |
| COLLECT CARGO | 1.00s |
| DRIVE TO SCORING POSITION | 2.22s |
| SCORE 2 CARGO IN UPPER HUB | 2.00s |
| TOTAL TIME | 12.54s |
| POINTS | 18.00p |
| POINTS PER SECOND | 1.20p/s |
TELE-OP CYCLE TIMES

- It is expected that cargo will bounce most often to the orange areas.
- It is expected that cargo will bounce less often to the yellow areas
| Zone | Time |
| Zone 1 | 3.00s |
| Zone 2 | 5.00s |
| Zone 3 | 6.00s |
| Zone 4 | 10.00s |
| Zone 5 | 5.00s |
| Zone 6 | 4.00s |
| Zone 7 | 4.00s |
| Zone 8 | 8.00s |


PROTOTYPING
PHILOSOPHY
THE TIME YOU SPEND ON BOTH SUBSYSTEM A AND SUBSYSTEM B, REDUCES THE TIME YOU CAN
SPEND ON OPTIMIZING A SUBSYSTEM
| BEFORE | NOW |  |
| Prototype all the concepts you come up with | Optimize a system you know that works | |
| Use machine-shopped wood | Use laser-cut wood to test several configurations | |
| Prototype all systems separately | Have a standard drivetrain to test prototypes on | |
| Connect motors directly to the battery | Have a controls board including Rio, PDH, etc. | |
|
||

TEAM REMBRANDTS 4481 PRESENTS

 |
 |
 |
 |
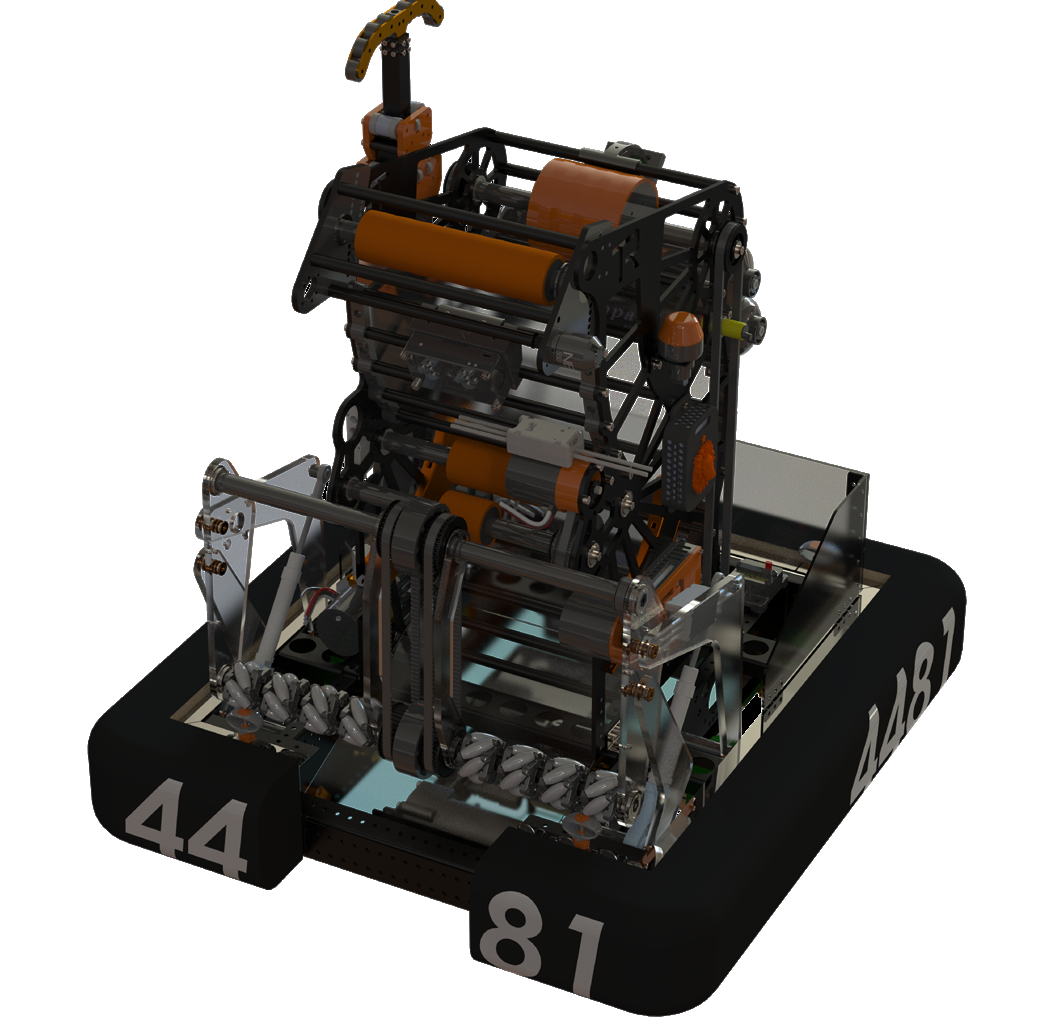
Drivetrain

- Custom-made sheet metal frame
- 600 x 550mm | 23.6 x 21.7in
- 12.7 Kg | 28 lbs
- 6 Wheel drivetrain
- 3 Wheels connected to one gearbox
- 1.5mm center drop
- 12:22 Output ratio
- #35 Chain transmission
BULLETPOINT SHOOTER

- Storage for two CARGO.
- A feeder with mechanum wheel to center the CARGO at all times.
- CARGO being shot by 6x 4” stealth wheels driver by 2x NEO motor.
- Adjustable hood with top roller driven by a NEO 550 to shoot CARGO from any position on the field.
Intake

- Made out of a combination of 5mm and 8mm thick polycarbonate arms
- Based on a 4-Bar mechanism to expand and collapse the intake
- Movement by 2x SMC C85N16-50 pneumatic cylinders directed by an SMC 5/3 solenoid valve
- Designed to easily assemble and disassemble
Climber

- 2 stage climber to get mid-rung.
- Driven by NEO motor with pneumatic brake.
- Gearbox reduction of 12:1 to climb within 3 sec.
- 1st stage is a 755mm long 50x50x2mm aluminium tube.
- 2nd stage is a 740-long 25x25x2mm carbon fiber tube.
RESURRECTION V0

RESURRECTION V2

RESURRECTION V1

RESURRECTION V3

Pneumatics

Electronics

OPEN ALLIANCE

This year Team Rembrandts is once again a member of the open alliance, an alliance of teams that are sharing their plans, findings, and progress throughout the entire build season.
The vision of these teams is not to keep everything a secret, but to inspire others with the
information is given and gives them an opportunity to bring out the best of themselves.
Our build thread is open on chief Delphi for everyone and questions asked are answered to help each other in the best way possible.
